打开文本图片集
摘要:在民用领域,抛放式飞行记录器在国内外尚无系统的研究报告,也无成熟的标准、规范或指南可以借鉴参考。本文提出的计算流体力学(CFD)与六由度运动方程的耦合仿真技术,能较准确地模拟出大部分工况下记录器抛放时的运动轨迹,为记录器离机安全性这一关键技术攻关提供理论依据数据支持,从而有效降低研发成本。
关键词:抛放式飞行记录器,离机安全性;仿真技术;CFD++求解器;嵌套网格;降低研发成本
中图分类号:V19 文献标识码:A
传统飞行记录器由于安装在飞机内部,若飞机失事坠毁于陆地,会遭受机体残骸的冲击和火烧等破坏,虽然其抗坠毁性能标准在不断提高,但在一些严重事故中,损坏情况仍有发生;若飞机失事坠毁于海面,会随机体一同坠人海底,不易于搜寻和打捞。而抛放式飞行记录器由于可在飞机失事坠毁前迅速与机体分离,并具有水面漂浮能力,避免了机体残骸的冲击破坏和沉人海底的情况发生,不仅便于事故后搜寻和打捞,同时可作为传统飞行记录器的备份,提高数据存活率。因此,研发抛放式飞行记录器对民用飞机事故后的搜索救援、事故分析具有极其重要的意义。
对于抛放式飞行记录器的研究,目前国内外正在开展关键技术攻关,目前已少量运用于部分军用飞机,但在民用领域,尚无系统的研究报告,亦无成熟的标准、规范或指南可以借鉴参考。研发抛放式飞行记录器的关键技术之一是记录器与飞机分离过程的轨迹研究,这主要是由于飞机事故状态及记录器误抛时飞机的状态形式复杂,通过飞行试验研究分离轨迹成本代价高,难以实现。本文采取计算流体力学(CFD)与六自由度运动方程的耦合仿真技术对记录器分离过程进行数字仿真,能较准确地模拟出大部分工况下记录器抛放时的运动轨迹,为该关键技术攻关提供理论依据,并有效降低研发成本。
1 飞行记录器概述
1.1 传统飞行记录器
飞行记录器,又称飞机数据记录器,俗称“黑匣子”,可记录飞机的飞行参数和舱内话音。传统飞行记录器通常安装在飞机尾部最安全的部位,具有极强的抗毁性能,在飞机失事时可完好地保存所记录数据,供事故分析。
1.2 抛放式飞行记录器
抛放式飞行记录器是一种新型飞行记录器,在传统飞行记录器的基础上增加了失事时自动抛放功能。抛放式飞行记录器在飞机正常飞行时与传统飞行记录器功能相同,记录飞机各系统的飞行数据和声频数据;不同于传统飞行记录器安装在飞机内部,其通常安装在飞机上部,作为冗余记录装置。在飞机失事时自动抛放出机体,并具有水上漂浮能力。
2 抛放式记录器离机安全性和仿真难点
2.1 离机安全性
抛放式记录器离机安全性主要分为两个部分,一是误抛状态下对飞机安全性的影响,二是事故抛放后记录器不会撞击飞机造成自己损坏。抛放式记录器离机安全性是研发抛放式记录器的关键技术之一,其中误抛状态下对飞机安全性的影响对于抛放式记录器是否能通过适航批准并运用于民用飞机尤其重要,因为必须保证在全飞行包线内记录器的误抛都不能对飞机造成灾难性的影响。
解决抛放式记录器离机安全性研究途径包括实验室试验、飞行试验和数值模拟仿真。实验室试验通常为风洞试验或者建立飞机局部机身试验模型进行试验,前者难以真实模拟出记录器抛放瞬间的真实情况,后者难以模拟飞机的真实飞行情况。飞行试验结果最为准确,但是要研究全包线飞行范围内的记录器分离情况需要试验架次太多,成本太高,且具有一定的安全隐患,无法试验事故工况。数值模拟仿真可为抛放式记录器离机安全性提供理论依据和数据支持,再结合少量的飞行试验进行相互验证,可大大降低研发成本,提高研究效率。
本文提供一种数值仿真方法,即CFD与六自由度运动方程的耦合仿真方法,对抛放记录器的分离过程进行仿真,为抛放式记录器离机安全性研究提供理论依据和数据支持。
2.2 仿真难点
首先记录器在抛放力作用下,与飞机分离,此时受到飞机流场干扰,其轨迹会发生变化,该非定常过程需采用飞行动力学才能描述清楚。因此,需要解決在飞机流场干扰的气动力影响下抛放器非定常飞行动力学建模与仿真问题。
记录器抛放一般分为误抛状态以及失事状态。失事状态下飞机飞行过程非定常特征及大迎角特征明显,姿态变化剧烈,虽然记录器对飞机的流场干扰可以忽略,但还是需要解决飞机非定常飞行动力学建模与仿真问题。特别需要指出的是,对于这两个过程需要进行统一坐标空间和统一时序下的仿真,模型复杂,计算规模大幅度增加。国外有篇文献中给出了采用CFD耦合六自由度运动方程仿真座舱盖抛放的非定常过程,但是在一台DEC Alpha工作站仅模拟0.3s非定常抛放过程就需要7天时间,计算量太过庞大。
3 抛放式记录器离机仿真方法分析
目前抛放式记录器离机安全性仿真有两种方法,各有优缺点:一种是耦合CFD计算和六自由度运动方程的非定常仿真过程,该方法预测轨迹精度较准确,但计算量偏大,需要借助超大规模并行计算机来实现,计算费用很高;另一种是采用考虑非定常效应的气动力系数修正,获得记录器气动力系数表,该方法预测轨迹精度可满足工程计算要求,用工作站代替超大规模并行计算机,降低了计算费用,但计算需要花费大量的时间。
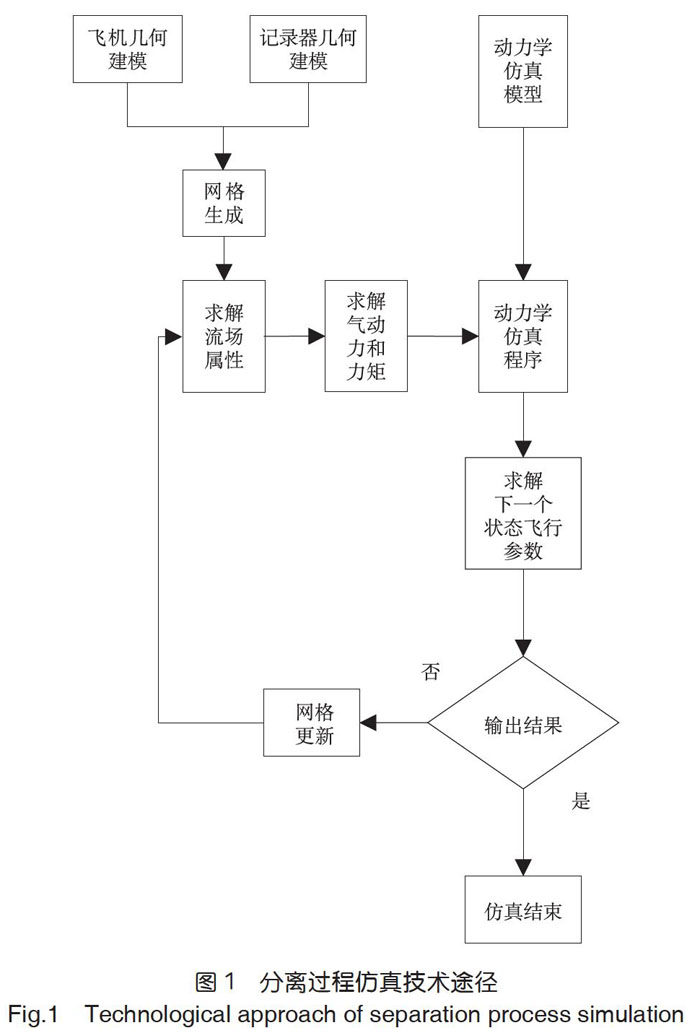
本文采用CFD与六自由度运动方程的耦合仿真技术对记录器抛放情况进行仿真,其中使用非结构动态嵌套网格方法来生成网格,并使用CFD++求解器进行嵌套网格的仿真求解,可在不影响计算精度的前提下简化计算过程,提高研究效率。具体仿真技术途径如图1所示。
嵌套网格的方法对于抛放式记录器仿真来说及其适合。嵌套网格可以使相对的独立网格独立运动,而不会干扰其他区域的网格,对非定常流场仿真时可以得到较精准的结果。而且嵌套网格区域可独立生成网格,将复杂的结构网格生成过程简化y。
使用CFD++在嵌套网格的计算独树一帜。求解器中对相对运动的多套网格间,有完整的定义机制,在保证计算精度的前提下,尽可能地简化了网格处理的方式。从网格导入到网格嵌套定义,再到参数设定,CFD++求解器都拥有很人性化的设计。
4 仿真方法
4.1 嵌套网格
本文针对的是流场下飞机与记录器分离轨迹的研究,所以采用非结构动态嵌套网格方法生成网格。
4.1.1 嵌套边界处理
嵌套网格中的网格层都是相互重叠的,所以需要采用合适的算法来规定各个重叠子区域网格之间的嵌套边界。在流场计算时,只需要知道各子区域内部的信息以及边界处用于流场信息交换的参数,因此,重叠的网格单元都需要从网格中“挖去”。当然,所谓的“挖去”网格只是把它们标记为非活动单元,即不参与流场的数值计算[2]。
CFD++软件中将与切割边界相交的网格单元定义为“Cut”单元,即非活动单元,如图2中标记为“C”的单元。
活动单元则是从所定义的活动边界开始,与活动边界相邻的网格单元均标记为活动单元,如图3中的“L”网格单元。
而且与活动网格单元相邻的单元均标记为活动单元,直到“Cut”单元为止,如图4所示,非活动单元的处理如图
5 所示。
通过上述方法我们确定了嵌套网格边界的同时,还找到了网格重叠区域网格点的宿主单元[3]。
4.1.2 网格间的插值
在同一个网格层中会遇到多个相互重叠的区域,则宿主单元的选取也不是唯一的,为了避免出现嵌套奇异的问题,我们选取满足以下原则的宿主单元:
(1)从宿主单元提供正确的流场信息考虑,宿主单元必须是激活状态下的;
(2)从宿主单元提供最佳的流场信息考虑,选取体积最小的那个。
4.2 控制求解
4.2.1 控制方程
三维非定常Euler方程的积分形式为[4]:
其中:
在上述偏微分方程组中,ρ,u,v,w,E,H和p分别表示密度、直角坐标系下三个速度分量、总能、总焓和压强;ix,iy,iz为笛卡儿坐标系中三个坐标方向的单位矢量。上述方程中,共有5个方程、7个变量,为使方程组封闭,考虑到理想完全气体的热力学性质,有:
式中:γ为比热[容]比,对于空气有γ=1.4。
4.2.2 时间推进
为模拟非定常状态下记录器在流场中的运动轨迹,此次项目采用双时间方法进行时间步进,在伪时间方向上采用无矩阵存储的前后扫掠高斯一赛德尔迭代方法(LU-SGS)。控制方程可写为:式中:n和n+1表示计算迭代的步数,Rin+1是第n+1步迭代产生的残值。采用时间方向上的一阶前插,有:
又可写为:
式中:
对于式(6)中的残值项:
式中:"Sij|为交界面面积;下标i,j分别为交界面两侧的单元。作用[5]。则有:
令L,U,D分别表示上三角矩阵、下三角矩阵和对角矩阵,则可得下面公式:
将控制方程写成以下格式:
求解该方程可按照以下两步进行:
(1)向前扫掠
(2)向后扫掠
又因为:
所以该方法不需要存储矩阵中的变量。展开形式可写为:
4.2.3 坐标变换
在研究机体坐标系和记录器的体坐标系变换关系时,首先将两坐标系的原点重合平移。然后,机体坐标系绕某个轴旋转,直至与记录器坐标系重合[6]。本文定义旋转的角度即是记录器的姿态角,分别为滚转角α、偏航角β以及俯仰角γ。转换关系如下:
4.2.4 6DOF计算
非结构嵌套动态网格适用于复杂模型的非定常流场的求解,并且求解过程方便、有较高的效率和可靠性。在CFD++软件中有6DOF计算模块,为求解器計算提供每一个时间步长的力和力矩,然后6DOF模块根据力和力矩确定记录器的质心位移和姿态角,最后嵌套动态网格移动到相应的位置,求解器再次计算此状态下记录器所受的力和力矩作为下一个状态的初始值,如此往复,直到求解结束。
5 仿真计算结果实例与分析
按上述方法对安装了抛放式记录器的某型机进行分离过程仿真模拟计算。
结合选取飞机低平尾的特点,将抛放式飞行记录器位置定于飞机垂尾顺航向左侧,示意图如图6所示。
5.1 仿真工况选择
仿真工况分为误抛放和事故抛放。
5.1.1 正常飞行过程中的误抛放
针对记录器在飞机上确定的安装位置,考虑飞机实际飞行中误抛的特殊性,选取飞行包线内7个工况状态,进行记录器误抛放分离过程数值仿真模拟,具体状态如下:
(1)高空高速正常飞行状态:飞行高度6000m,飞行速度420km/h,飞机迎角2°,侧滑角+5°;
(2)高空高速正常飞行状态:飞行高度6000m,飞行速度42°km/h,飞机迎角2°,侧滑角-5°;
(3)高空低速正常飞行状态:飞行高度6000m,飞行速度230km/h,飞机迎角4°,侧滑角+5°;
(4)高空低速正常飞行状态:飞行高度6000m,飞行速度230km/h,飞机迎角4°,侧滑角-5°;
(5)低空中速正常飞行状态:飞行高度2°0m,飞行速度260km/h,飞机迎角4°,侧滑角0°;
(6)低空低速正常飞行状态:飞行高度2°0m,飞行速度2°0km/h,飞机迎角4°,侧滑角0°,滚转角30°,方向沿X轴正向(垂尾记录器安装一侧);
(7)高空低速正常飞行状态:飞行高度6000m,飞行速度230km/h,飞机迎角4°,侧滑角-5°,方向舵偏转25°,方向沿Y轴负向(垂尾记录器安装一侧)。
5.1.2 事故状态的抛放
针对飞机可能出现的事故状态,分别选取三个事故状态下分离过程仿真,具体状态如下:
(1)飞机机头以00姿态坠毁,坠毁速度为马赫数Ma0.15;
(2)飞机机头以300姿态坠毁,坠毁速度为马赫数Ma0.15;
(3)飞机机头以60°姿态坠毁,坠毁速度为马赫数Ma0.15。
5.1.3 仿真计算结果
通过仿真计算结果得出结论,误抛放7个工况下,记录器抛放过程中不会与机体相碰,且记录器抛放后对全机气动性能影响可忽略不计;事故抛放三个工况下记录器均能快速与机体分离,抛放过程中不会与机体相碰,不会被机体残骸覆盖影响。
由于篇幅原因,本文仅展示误抛工况1的仿真模拟结果,图7~图9为各个视图下的压力云图模型记录器抛放过程的仿真计算结果。可以看出仿真轨迹清晰明了,记录器与飞机的相对位置一目了然,可明显观察到在記录器抛放过程中不会与机体相碰,从而对飞行安全造成影响。
6 结束语
本文对抛放式记录器离机过程的仿真,采用非结构动态嵌套网格对模型进行网格划分,并利用CFD++求解器软件对记录器抛放轨迹姿态及相关流场进行计算,最终成功模拟了记录器在10种工况状态下的抛放轨迹和姿态,用户可以更直观对抛放轨迹进行观察研究。该方法除了比较复杂的事故工况无法模拟外,如飞机空中爆炸或解体,其余各种误抛工况、坠毁事故工况等均可仿真模拟。
参考文献
[1]Choi Y H,Merkle C L.The application of pre-conditioning in viscousflow [J].Journal of Computational Physics,1993,105:207-223.
[2]Daniel J S.A cartesian multi-grid euler code for flow aroundarbitrary configurations[R].AM,1996.
[3]Lighthill M J.Displacement thickness[R].AIAA Paper,1979.
[4]Granville P S.The calculation of the viscous drag of bodies ofrevolution[R].Model Rasin Report,1953.
[5]Coles D E.Measurement in the boundary layer on a smooth flatplate in supersonic flow[R].Jet Propulsion Laboratory,1953.
[6]Graster P,Ferris D H,Atwell N P.Calculation of boundarylayer development using the turbulent energy equation[J].JournalFluid Mechanics,1967,28(3):593-616.